CASE STUDY -> AUTONOMOUS SYSTEMS
Decoupling cabin dynamics from chassis motion for robust autonomous perception.
In this article, we break down the system design, modelling approach, and real world implications.
01 — The Core Challenge
In heavy vehicles, the cabin is mechanically isolated from the chassis to improve operator comfort. While this is the right mechanical choice, it introduces a fundamental reference-frame conflict for any sensor-driven system mounted inside it.
The cabin sits on suspension elements that permit vertical displacement, pitch, and roll relative to the chassis. During braking, acceleration, cornering, or uneven terrain, the cabin moves independently of the vehicle base. Sensors mounted on the cabin therefore operate in a non-inertial, moving frame — and that movement is not the vehicle moving.
The cabin suspension allows vertical displacement, pitch, and roll relative to chassis. Every bump, brake, and corner produces independent cabin motion that sensors inside cannot distinguish from vehicle motion.
Perception, localisation, and control systems assume sensor data is expressed in a stable, chassis-referenced coordinate frame. When cabin motion is not explicitly accounted for, these systems misinterpret cabin dynamics as vehicle motion.
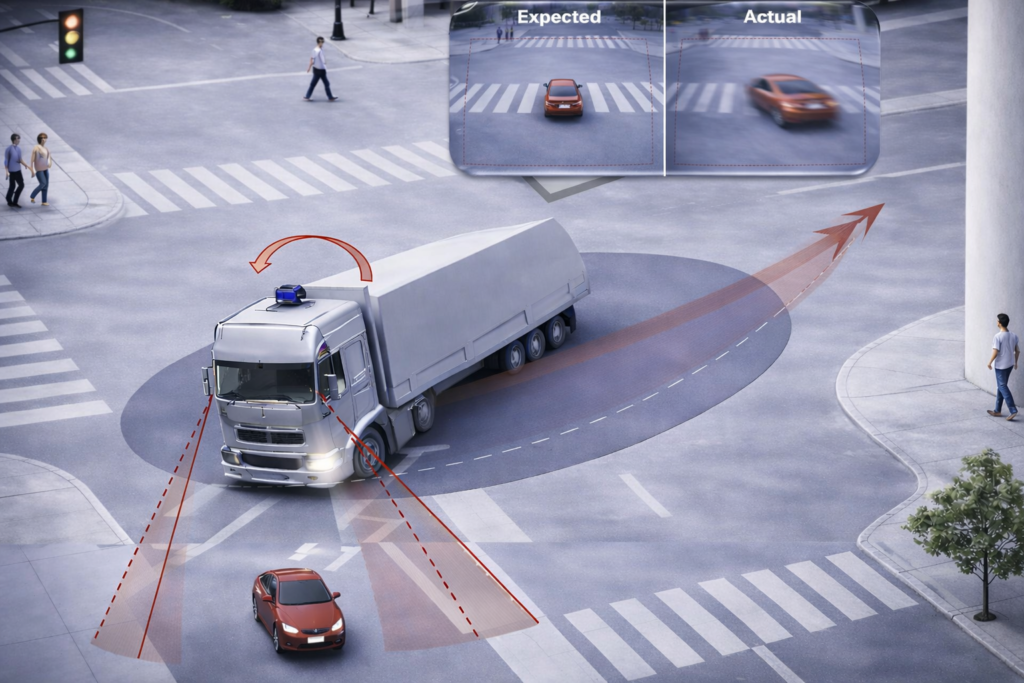
Key implication: This is not a sensor accuracy issue — it is an architectural mismatch. Without explicitly separating cabin motion from chassis motion, errors propagate across the entire autonomy and driver-assistance stack, degrading robustness, safety margins, and predictability.
02 — Cascading Impact
When cabin motion is not explicitly separated, its effects propagate through the vehicle stack in non-obvious ways — each layer compounding the error introduced by the layer before it.
Mixed cabin and vehicle dynamics corrupt raw sensor measurements.
Reference-frame errors integrate into drift and unstable pose estimates.
Controllers respond to phantom motion, degrading stability and comfort.
Conservative tuning reduces capability and complicates validation.
Key takeaway: The impact of cabin motion is systemic. Addressing it at the sensing or control level alone treats symptoms, not the root cause. Robust behavior requires architectural separation of motion sources.
03 — Our Solution
We eliminate cabin-induced reference-frame errors by explicitly separating cabin motion from chassis motion before sensor data reaches perception, localisation, or control systems.
1
Raw sensor measurements and vehicle state signals are collected and time-aligned as the foundation of the estimation pipeline.
2
A motion model captures cabin suspension dynamics — representing the relationship between chassis motion and cabin response across operating conditions.
3
Sensor data and model predictions are fused to produce a continuous, confident estimate of cabin pose relative to the chassis.
4
All downstream systems receive motion expressed in a stable, chassis-referenced coordinate frame — independent of cabin pitch, roll, or bounce.
The model is refined continuously based on observed behaviour — allowing the system to adapt to changing load conditions, vehicle wear, and operating environments without manual recalibration.
Estimation confidence and diagnostic feedback are produced alongside the motion estimate — providing the downstream stack with a live signal of estimation health for graceful degradation.
04 — Design Principles
Three principles guided the design — each chosen to ensure stable, deployable behaviour in the real operating environment.
1
Cabin dynamics and vehicle dynamics are estimated as distinct motion components rather than being implicitly embedded in cabin-mounted sensor measurements. This makes the problem structurally tractable instead of relying on downstream systems to compensate for an unmodelled input.
2
All downstream systems — perception, localisation, planning, and control — receive motion expressed in a consistent, chassis-referenced coordinate frame. This eliminates the reference-frame conflict at the architectural level, not at each individual subsystem.
3
The estimation structure avoids reliance on precise suspension parameters and remains stable across vehicle variants and loading conditions. Validation was conducted on data from a real vehicle across nominal operation, significant cabin disturbances, and degraded sensing conditions — with the focus on behavioural consistency and graceful degradation, not isolated peak metrics.
05 — Engineering Posture
Key takeaway: Cabin motion estimation is not a feature — it is a prerequisite for any heavy-vehicle autonomous or driver-assistance system where sensors are mounted inside a suspended cabin. Getting it right at the architecture level removes a hidden source of degradation from every subsystem that follows.
From strategy to execution, we partner with you to design, develop, and deliver software that solves real problems and scales with your business.
Über der Glonn 11, 85238 Petershausen